Arbi-arduino
CPU
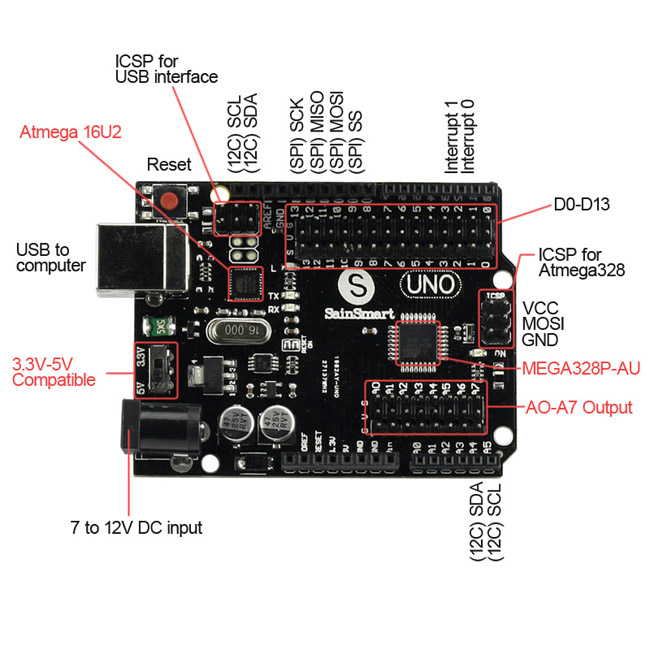
El rover ARBI1 usa una tarjeta
controladora SainSamart UNO R3 ATmega328-AU compatible con Arduino UNO.
El microcontrolador Atmel de la tarjeta ejecuta el programa a 20MHz, el
cual se implementa toda las funcionalidades de movimiento, diagnostico,
control y comunicaciones del rover.
Especificaciones
- ATmega328-AU microcontroller
- Input voltage - 7-12V
- 5V Electric current : 500MA
- 3.3V Electric current : 50MA
- 14 Digital I/O Pins (6 PWM outputs)
- 8 Analog Inputs
- 32k Flash Memory
- 16Mhz Clock Speed
Conexiones
| Pin CPU |
Pin Subsistema |
Descripcion |
| I2C SDA |
SDA AMC |
Bus de datos para controlar la placa de motores (AMC) |
| I2C SCL |
SCL AMC |
Reloj del bus de datos de la placa de motores (AMC) |
| D0 |
Serie TX |
|
| D1 |
Serie RX |
|
| D2 |
ECHO_SONAR2 |
Pin Echo del módulo HC-SR04 trasero |
| D3 |
TRIG_SONAR2 |
Pin de disparo del módulo HC-SR04 trasero |
| D4 |
ECHO_SONAR1 | Pin Echo del módulo HC-SR04 delantero |
| D5 |
TRIG_SONAR1 | Pin de disparo del módulo HC-SR04 delantero |
| D8 |
RX IR |
Pin de datos del receptor infrarojo para control remoto. |
| D9 |
Servo 2 AMC |
Movimiento de rotacion de SONAR1 |
| D13 |
LEDplaca |
Usado para indicar actividad por el puerto serie |
| A0 |
BAT |
Sensor de nivel de batería. |
Enlaces
Ver en página de componentes.Software.